
基于三维激光点云的复杂道路场景杆状交通设施语义分类
|
汤涌(1990—),男,安徽芜湖人,工程师,主要研究方向为三维激光点云数据处理,(E-mail)1225477872@qq.com。 |
收稿日期: 2020-03-08
修回日期: 2020-04-19
网络出版日期: 2020-10-10
基金资助
江苏省研究生科研与实践创新计划项目(KYCX18_1206)
Semantic Classification of Pole-Like Traffic Facilities in Complex Road Scenes Based on LiDAR Point Cloud
Received date: 2020-03-08
Revised date: 2020-04-19
Online published: 2020-10-10
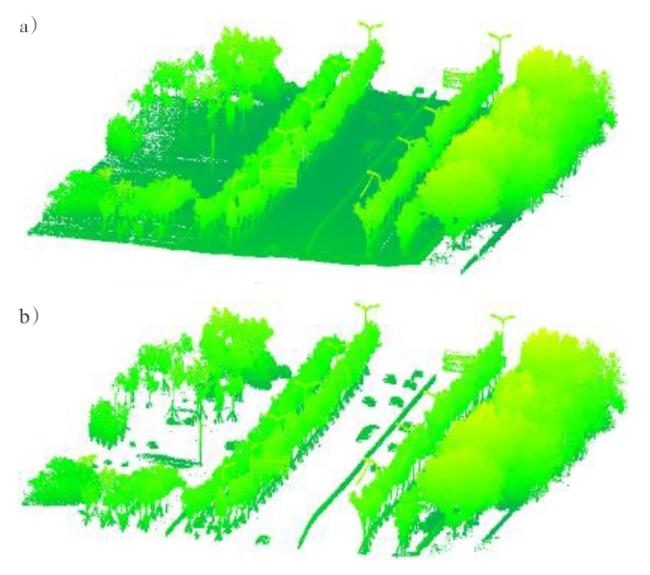
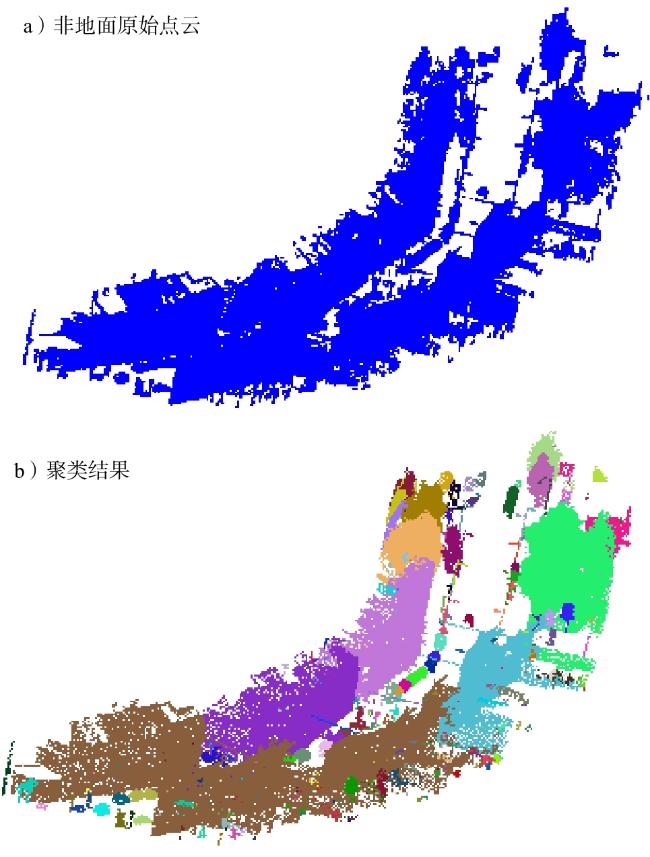
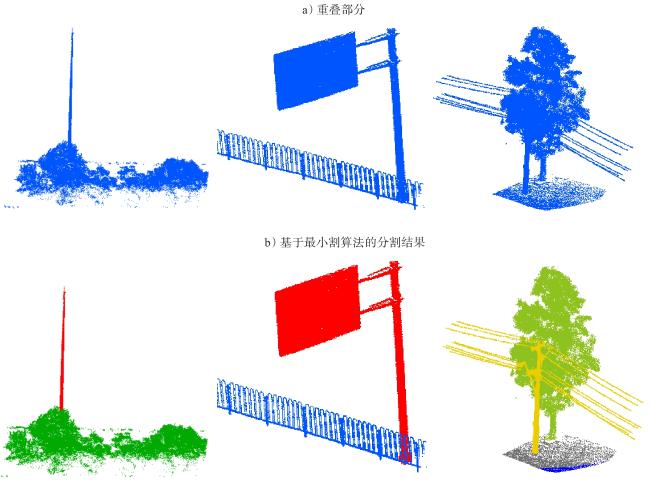
文章提出一种完整的全自动化处理框架,基于三维激光点云数据对高速公路和城市道路场景的杆状目标进行了检测和分类,主要包括3个步骤:数据预处理、杆状目标检测和分类。其中,在数据预处理阶段,采用基于布料模拟滤波算法自动分离地面点和非地面点,然后基于欧氏距离聚类方法对非地面点进行快速聚类,以及采用迭代图割算法进一步分割目标对象;在目标检测阶段,集成先验信息、形状信息和位置导向搭建滤波器,对杆状目标进行检测;在对象分类过程中基于多属性特征,利用随机森林分类器对目标的特征进行计算和分类。并使用3个道路场景数据集进行测试,结果显示,3个数据集的整体MCC系数为95.6%,分类准确率为96.1%。这说明文章所构建方法具有较高性能。另外,该方法还可以鲁棒地检测杆状目标的重叠区域,较为适应复杂程度不同的道路场景。
汤涌 , 项铮 , 蒋腾平 . 基于三维激光点云的复杂道路场景杆状交通设施语义分类[J]. 热带地理, 2020 , 40(5) : 893 -902 . DOI: 10.13284/j.cnki.rddl.003263
Pole-like objects are commonly occurring features on roads, and their identification in photographs is essential to the management and mapping of road information. In particular, mobile laser scanning systems comprise one of the most accurate and efficient techniques to gather road-related geospatial information. The automatic detection and classification of pole-like objects based on the point cloud data gathered by such systems enable significant reduction in costs and improvement in efficiency of mapping functions. This paper proposes a complete, fully automated processing framework that detects and classifies pole-like objects appearing in images of highways and urban streets based on the associated point cloud data. The primary workflow of the framework includes three steps: data preprocessing, detection, and classification of pole-like objects. During data preprocessing, an advanced filtration algorithm is used to automatically separate ground points from non-ground points. Subsequently, the non-ground points are clustered and overlapping clusters are further separated via a collaborative iterative graph cutting algorithm. During object detection, all available information, including shape information and position guidance, are integrated to detect pole-like objects. During object classification, the multiple aggregation levels of features and the contextual features corresponding to each object are calculated and transmitted into a random forest classifier to classify the detected pole-like structures. The proposed method was tested on three road scene datasets. The overall MCC coefficient corresponding to all three datasets was observed to be 95.6% during detection, and the overall classification accuracy corresponding to the three datasets was 96.1% during classification. Further, comparative experiments with respect to existing techniques were conducted, and the results demonstrated that the proposed method significantly improves the recognition of road facilities.
表1 杆状设施目标检测结果的定量分析Table 1 Quantitative results of pole-like objects detection |
| 数据集 | 真实值 | TP | FP | TN | FN | 召回率/% | 准确率/% | F1值/% | MCC/% |
|---|---|---|---|---|---|---|---|---|---|
| 合计 | 480 | 459 | 27 | 175 676 | 21 | 95.6 | 94.4 | 95 | 95.6 |
| Ⅰ | 96 | 94 | 3 | 9 617 | 2 | 97.9 | 96.9 | 97.4 | 97.4 |
| Ⅱ | 215 | 197 | 20 | 156 497 | 18 | 91.6 | 90.1 | 90.8 | 95.2 |
| Ⅲ | 169 | 168 | 4 | 9 562 | 1 | 99.4 | 97.7 | 98.5 | 95.5 |
表2 杆状道路设施分类结果定量分析Table 2 Quantitative results for pole-like road objects classification |
| 数据集 | 对象 | 悬臂标志 | 柱式标志牌 | 路灯杆 | 电线杆 | 红绿灯 | 其他 | 准确值/% | 召回值/% |
|---|---|---|---|---|---|---|---|---|---|
| 数据集Ⅰ | 悬臂标志 | 15 | 0 | 0 | 0 | 0 | 0 | 100 | 93.8 |
| 柱式标志 | 1 | 5 | 0 | 0 | 0 | 0 | 83.3 | 100 | |
| 路灯杆 | 0 | 0 | 59 | 1 | 0 | 0 | 98.3 | 98.3 | |
| 电线杆 | 0 | 0 | 1 | 8 | 1 | 0 | 80.0 | 88.9 | |
| 红绿灯 | 0 | 0 | 0 | 0 | 2 | 0 | 100 | 66.7 | |
| 其他 | 0 | 0 | 0 | 0 | 0 | 1 | 100 | 100 | |
| 总体精度:90/94×100%=95.7% | |||||||||
| 数据集Ⅱ | 悬臂标志 | 25 | 0 | 0 | 0 | 0 | 0 | 100 | 86.2 |
| 柱式标志 | 3 | 28 | 1 | 1 | 0 | 0 | 84.8 | 100 | |
| 路灯杆 | 0 | 0 | 111 | 2 | 0 | 0 | 98.2 | 97.4 | |
| 电线杆 | 0 | 0 | 2 | 16 | 0 | 1 | 84.2 | 84.2 | |
| 红绿灯 | 1 | 0 | 0 | 0 | 3 | 0 | 75.0 | 100 | |
| 其他 | 0 | 0 | 0 | 0 | 0 | 3 | 100 | 100 | |
| 总体精度:186/197×100%=94.4% | |||||||||
| 数据集Ⅲ | 悬臂标志 | 15 | 1 | 0 | 0 | 0 | 0 | 93.8 | 100 |
| 柱式标志 | 0 | 12 | 0 | 0 | 0 | 1 | 92.3 | 92.3 | |
| 路灯杆 | 0 | 0 | 123 | 1 | 0 | 0 | 99.2 | 100 | |
| 电线杆 | 0 | 0 | 0 | 9 | 0 | 0 | 100 | 90.0 | |
| 红绿灯 | 0 | 0 | 0 | 0 | 1 | 0 | 100 | 100 | |
| 其他 | 0 | 0 | 0 | 0 | 0 | 5 | 100 | 83.3 | |
| 总体精度:165/168×100%=98.2% | |||||||||
| 3个数据集平均精度:441/459×100%=96.1% | |||||||||
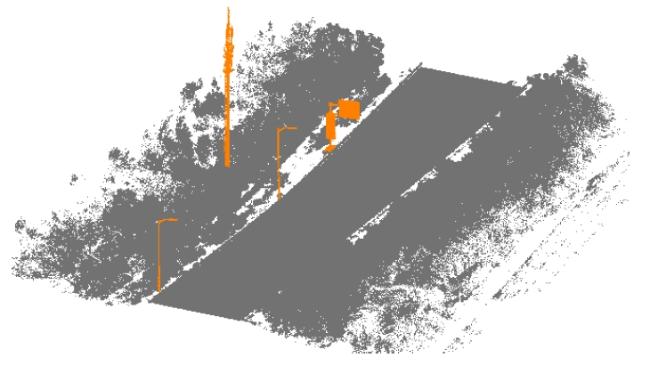
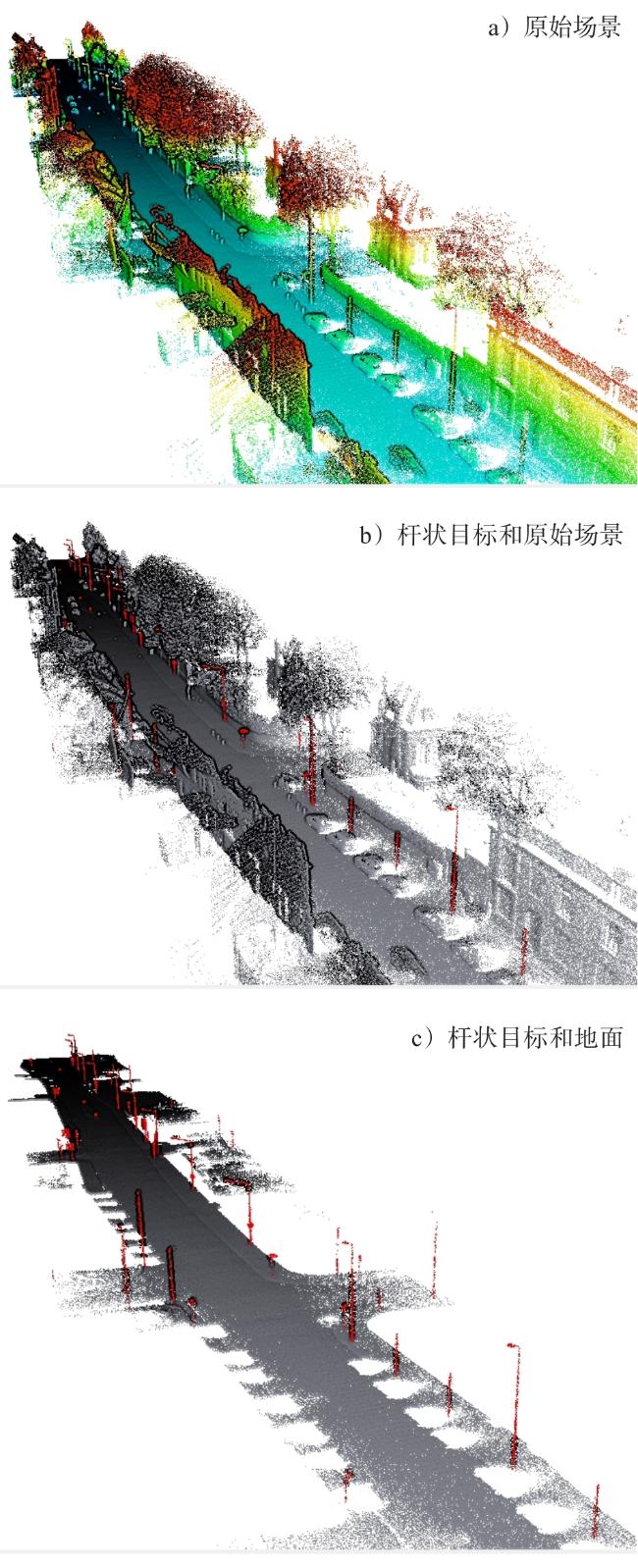
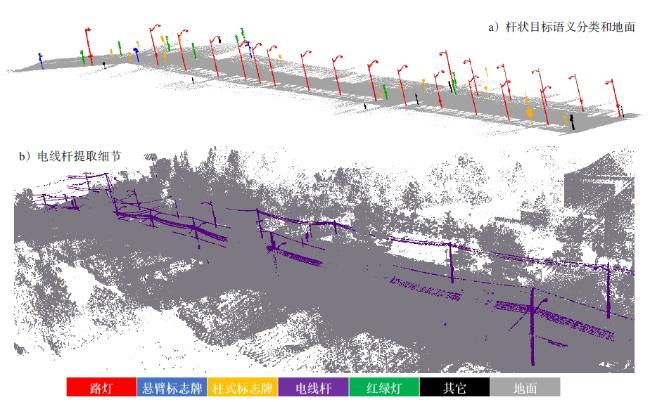
图9 杆状设施语义分类结果示例Fig. 9 Examples of the classification results for pole-like objects |
表3 方法对比Table 3 Compare with other method |
| 方法 | 整体精度/% |
|---|---|
| 现有方法(Yang et al., 2015) | 92.30 |
| 本文方法 | 96.10 |

|
Cabo C, Ordoñez C, García-Cortés S and Martinez J.2014.An Algorithm for Automatic Detection of Pole-Like Street Furniture Objects from Mobile Laser Scanner Point Clouds.ISPRS Journal of Photogrammetry & Remote Sensing, 87: 47-56.
|
|
董亚涵,李永强,李鹏鹏,范辉龙.2019.基于车载LiDAR点云的杆状地物分类研究.测绘工程,28(6):58-63.[Dong Yahan, Li Yongqiang, Li Pengpeng and Fan Huilong.2019.On the Classification of Rod-Shaped Object Based on Point Cloud of Mobile LiDAR.Engineering of Surveying and Mapping, 28(6): 58-63.]
|
|
董震,杨必胜.2015.车载激光扫描数据中多类目标的层次化提取方法.测绘学报,44(9):980-987.[Dong Zhen and Yang Bisheng.2015.Hierarchical Extraction of Multiple Objects from Mobile Laser Scanning Data.Acta Geodaetica et Cartographica Sinica, 44(9): 980-987.]
|
|
Golovinskiy A, Kim V and Funkhouser T.2009.Shape-Based Recognition of 3D Point Clouds in Urban Environments. Kyoto, Japan: Processing of the IEEE International Conference on Computer Vision, 2154-2161.
|
|
蒋腾平,王永君,陶帅兵,李云莉,刘姗.2018.功能性规则约束下的三维点云道路设施语义标注.南京师范大学学报(工程技术版),18(4):52-58.[Jiang Tengping, Wang Yongjun, Tao Shuaibing, Li Yunli and Liu Shan.2018.3D Point Cloud Road Facilities Semantic Labeling Constrained by Functional Rules.Journal of Nanjing Normal University (Engineering and Technology Edition), 18(4): 52-58. ]
|
|
Pan R and Taubin G.2016.Automatic Segmentation of Point Clouds from Multi-View Reconstruction Using Graph-Cut. Visual Computer, 32(5): 601-609.
|
|
Rusu R, Blodow N and Beetz M.2009.Fast Point Feature Histograms (FPFH) for 3D Registration. Kobe, Japan: IEEE International Conference on Robotics and Automation (ICRA), 3212-3217.
|
|
Wang Y, Jiang T, Yu M, Tao S, Sun J and Liu S.2020.Semantic-Based Building Extraction from LiDAR Point Clouds Using Contexts and Optimization in Complex Environment. Sensors, 20: 3386.
|
|
王鹏,刘如飞,马新江.2017.车载激光点云中杆状目标自动提取.遥感信息,32(5):52-56.[Wang Peng, Liu Rufei and Ma Xinjiang.2017.Automatic Extraction of Pole-Like Objects from Vehicle Borne Laser Scanning Point Clouds.Remote Sensing Information, 32(5): 52-56.]
|
|
Wu F, Wen C, Guo Y, Wang J Wang C and Li J.2017.Rapid Localization and Extraction of Street Light Poles in Mobile LiDAR Point Clouds: a Supervoxel-Based Approach. IEEE Transactions on Intelligent Transportation Systems, 18(2): 292-305.
|
|
Yan L, Li Z, Liu H, Tan J, Zhao S and Chen C.2017.Detection and Classification of Pole-Like Road Objects from Mobile LiDAR Data in Motorway Environment. Optics and Laser Technology, 97: 272-283.
|
|
Yang B, Dong Z, Zhao Gang and Dai Wenxia.2015.Hierarchical Extraction of Urban Objects from Mobile Laser Scanning Data. ISPRS Journal of Photogrammetry and Remote Sensing, 99: 45-57.
|
|
Yang B, Dong Z, Liu Y, Liang F and Wang Y.2017.Computing Multiple Aggregation Levels and Contextual Features for Road Facilities Recognition Using Mobile Laser Scanning Data. ISPRS Journal of Photogrammetry and Remote Sensing, 126: 180-194.
|
|
杨洲,康志忠,杨俊涛,周梦蝶,孔民.2020.车载点云中杆状地物的形态学分析与分类研究.测绘科学,45(1):69-76.[Yang Zhou, Kang Zhizhong, Yang Juntao, Zhou Mengdie and Kong Min.2020.Research on Morphological Analysis and Classification of Pole-Like Objects from Mobile LiDAR Point Clouds.Science of Surveying and Mapping, 45(1): 69-76.]
|
|
Yokoyama H, Date H, Kanai A and Takeda H.2013.Detection and Classification of Pole-Like Objects from Mobile Laser Scanning Data of Urban Environments. International Journal of CAD/CAM, 13(2): 31-40.
|
|
Yu Y, Li J, Guan H, Wang C and Yu J.2015.Semiautomated Extraction of Street Light Poles from Mobile LiDAR Point-Clouds. IEEE Transactions on Geoscience & Remote Sensing, 53(3): 1374-1386.
|
|
Zhang W, Qi J, Wan P, Xie D, Wang X and Yan G.2016.An Easy-to-Use Airborne LiDAR Data Filtering Method Based on Cloth Simulation. Remote Sensing, 8(6): 501.
|
|
张西童,刘会云,李永强,黄腾达,李有鹏.2016.车载LiDAR场景中路灯的提取与识别.测绘工程,25(9):50-54.[Zhang Xitong, Liu Huiyun, Li Yongqiang, Huang Tengda and Li Youpeng.2016.Street Lamp Extraction and Identification from Mobile Lidar Point Cloud Scenes.Engineering of Surveying and Mapping, 25(9): 50-54.]
|
|
Zheng H, Wang R and Xu S.2017.Recognizing Street Lighting Poles from Mobile LiDAR Data. IEEE Transaction on Geoscience and Remote Sensing, 55(1): 407-420.
|
|
Zhu L, Hyypp J, Kukko A, Kaartinen and Chen R.2011.Photorealistic Building Reconstruction from Mobile Laser Scanning Data. Remote Sensing, 3(7): 1406-1426.
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}