
多光谱遥感数据与多类型机器学习算法的浅海水深反演方法评价
|
王照翻(1991—),男,海南澄迈人,工程师,硕士,主要研究方向为遥感地质调查、自然资源调查及生态调查,(E-mail)921944863@qq.com; |
收稿日期: 2022-10-26
修回日期: 2023-05-18
网络出版日期: 2023-09-11
基金资助
中国地质调查局地调项目“海南岛东南海域自然资源调查试点”(DD20220993)
中国地质调查局地调项目“重要海峡通道遥感地质调查”(DD20191011)
湖北省国土测绘院科技项目(CHYKJ2022-04)
Assessment of Multi-Spectral Imagery and Machine Learning Algorithms for Shallow Water Bathymetry Inversion
Received date: 2022-10-26
Revised date: 2023-05-18
Online published: 2023-09-11
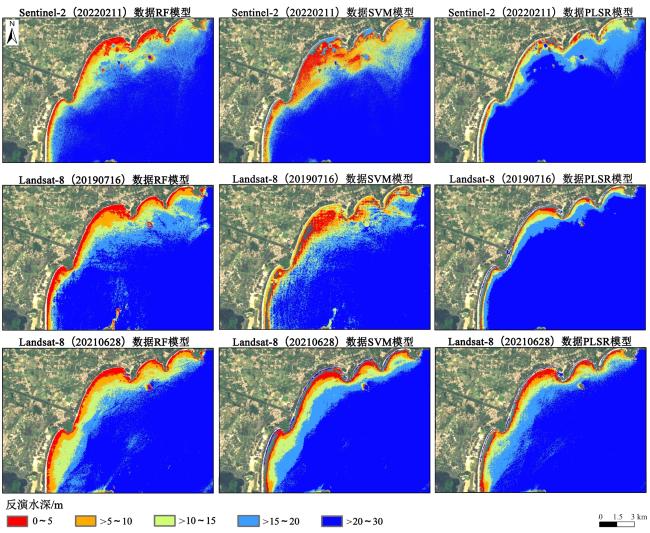
以万宁海域为例,选取不同水环境条件的3景Landsat-8(20190716、20210628)与Sentinel-2数据,利用随机森林(Random Forest, RF)回归、支持向量机(Support Vector Machine, SVM)、偏最小二乘(Partial Least Squares Regression, PLSR)3种机器学习方法分别开展水深反演试验,并评价其精度。结果显示,水体透明度最好、海浪效应最弱的一景Landsat-8(20190716)数据获得最高的水深反演精度,在0~40 m水深区间,R 2为0.814,MAE、RMSE和MAPE分别为3.39 m、4.31 m和0.366,在0~20 m水深区间,R 2为0.874,MAE、RMSE和MAPE分别为2.24 m、3.24 m和0.449。RF算法在整个水深区间获得相对高的水深反演精度,SVM和PLSR算法在部分水深区间的水深反演中显示出优势。
王照翻 , 马梓程 , 熊忠招 , 孙天成 , 黄赞慧 , 符钉辉 , 陈靓 , 谢菲 , 谢翠容 , 陈思 . 多光谱遥感数据与多类型机器学习算法的浅海水深反演方法评价[J]. 热带地理, 2023 , 43(9) : 1689 -1700 . DOI: 10.13284/j.cnki.rddl.003742
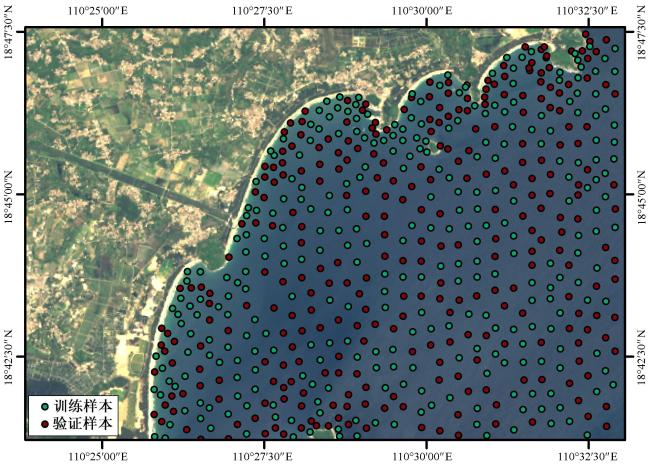
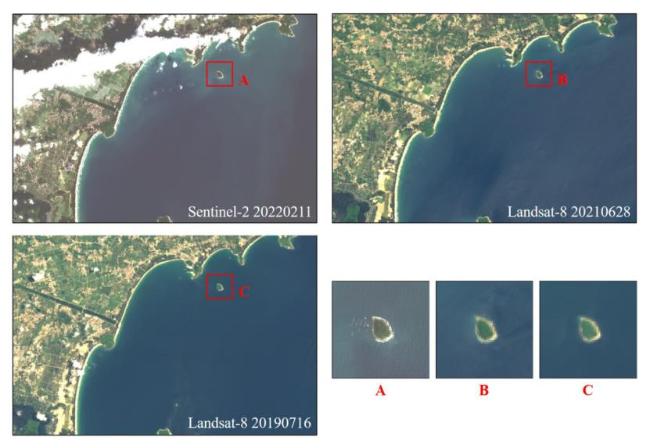
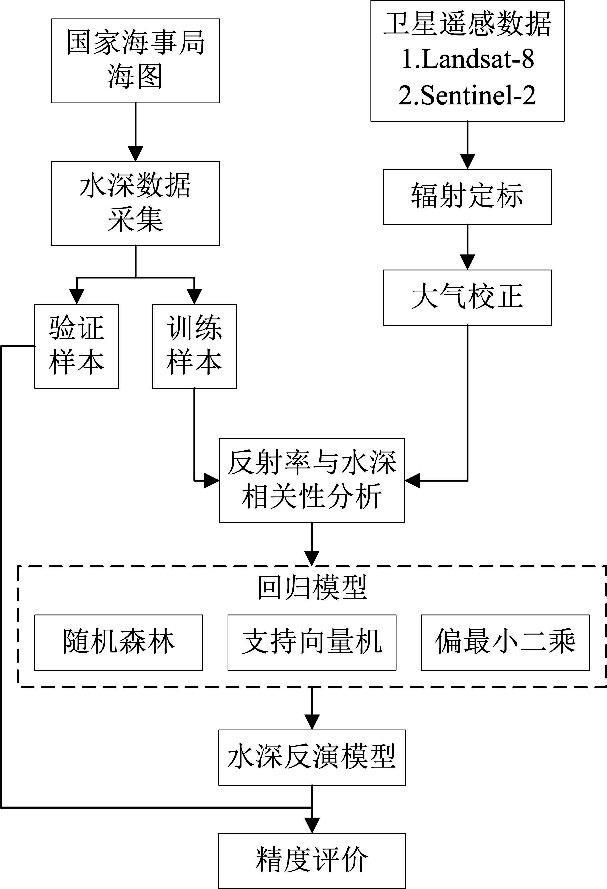
The eastern coastal zone of Hainan Island is an important scenic belt and concentrated area of tourism resources in Hainan Province. Due to natural factors such as sea level rise and human factors such as coastal reclamation, the ecosystem in this area is highly sensitive. Water depth data are crucial for the protection and management of the coastal ecosystem. Satellite remote sensing data combined with machine learning algorithms have become an important means of shallow water depth inversion. However, few studies evaluate shallow water depth inversion for different remote sensing data, water environmental conditions, and algorithms. Taking the Wanning Sea area as an example, three scenes of Landsat-8 and Sentinel-2 data with different water environmental conditions were selected to apply water depth inversion. The Sentinel-2 data were collected on February 11th, 2022, with some suspended matter and poor water transparency in the nearshore water, and the image exhibited band-like reflectance anomalies caused by waves. The Landsat-8 data were collected on July 16, 2019, and June 28th, 2021. Both scenes had better water transparency than the Sentinel-2 data, and relatively less suspended matter in the nearshore water. Compared to the Landsat-8 data collected on June 28th, 2021, the image of Landsat-8 data collected on July 16th, 2019, showed stronger wave features in the nearshore water. A 1:25,000 maritime chart of the Potou Port and Dazhou Island (C1516171) area released by the China Maritime Safety Administration was collected to obtain 588 measured water depth data points in the study area. Among these, 295 randomly selected data points were used as training data for the remote sensing water depth inversion, and the remaining 293 data points were used as testing data to evaluate the accuracy of the inversion models. A total of three machine learning methods, including Random Forest regression, Support Vector Machine, and Partial Least Squares Regression, were used for water depth inversion experiments, and their accuracy was evaluated. The results indicated that the Landsat-8 data (20190716) with the best water transparency and weakest wave effect achieved the highest accuracy in water depth inversion. In the water depth range of 0-40 m, the R 2 was 0.814, and the MAE, RMSE, and MAPE were 3.39 m, 4.31 m, and 0.366, respectively. In the water depth range of 0-20 m, the R 2 was 0.874, and the MAE, RMSE, and MAPE were 2.24 m, 3.24 m, and 0.449, respectively. The RF algorithm obtained relatively high accuracy in the entire water depth range, while the SVM and PLSR algorithms displayed advantages in some shallow water depth inversions. The spatial resolution of optical remote sensing images is not an absolute positive correlation with the accuracy of water depth inversion. The hydrological characteristics of the water bodies in the remote sensing images have a significant impact on water depth inversion accuracy. Factors such as water transparency, suspended matter concentration, and seawater waves will affect the inversion accuracy. In the process of using optical remote sensing data for shallow water depth inversion, data with high water transparency and calm water conditions should be selected for modeling and inversion. The results have certain reference value for data source and algorithm selection in shallow water depth inversion based on multispectral remote sensing data.
表1 各卫星指标参数对比Table 1 Comparison of satellite parameters |
| 卫星 | 光谱范围/μm | 空间分辨率/m | 采集时间 |
|---|---|---|---|
| Sentinel-2A | Band1:0.43~0.45 | 60 | 2022-02-11 |
| Band2:0.45~0.53 | 10 | ||
| Band3:0.54~0.58 | 10 | ||
| Band4:0.65~0.68 | 10 | ||
| Band5:0.70~0.71 | 20 | ||
| Band6:0.73~0.75 | 20 | ||
| Band7:0.77~0.79 | 20 | ||
| Band8:0.78~0.89 | 10 | ||
| Band8A:0.85~0.88 | 10 | ||
| Band9:0.94~0.96 | 60 | ||
| Band10:1.36~1.39 | 60 | ||
| Band11:1.57~1.66 | 20 | ||
| Band12:2.11~2.29 | 20 | ||
| Landsat-8 OLI | Band1:0.43~0.45 | 30 | 2021-06-28 2019-07-16 |
| Band2:0.45~0.52 | 30 | ||
| Band3:0.53~0.60 | 30 | ||
| Band4:0.63~0.68 | 30 | ||
| Band5:0.85~0.89 | 30 | ||
| Band6:1. 56~1.67 | 30 | ||
| Band7:2.10~2.30 | 30 |
表2 水深反演精度分析Table 2 Analysis of bathymetric inversion accuracy |
| 数据源 | 反演算法 | R 2 | MAE/m | RMSE/m | MAPE |
|---|---|---|---|---|---|
| Sentinel-2 (20220211) | RF | 0.764 | 3.96 | 4.81 | 0.673 |
| SVM | 0.720 | 4.64 | 6.02 | 0.696 | |
| PLSR | 0.477 | 6.36 | 7.86 | 1.653 | |
| Landsat-8 (20190716) | RF | 0.814 | 3.39 | 4.31 | 0.366 |
| SVM | 0.764 | 4.40 | 5.53 | 1.214 | |
| PLSR | 0.536 | 6.40 | 7.45 | 1.811 | |
| Landsat-8 (20210628) | RF | 0.796 | 3.65 | 4.88 | 0.510 |
| SVM | 0.754 | 4.40 | 5.62 | 1.041 | |
| PLSR | 0.699 | 4.73 | 6.92 | 1.120 |
表3 不同水深各卫星数据各反演算法精度分析Table 3 Accuracy analysis of different satellite data and inversion algorithms for various water depths |
| 水深 | 数据源 | 反演算法 | R 2 | MAE/m | RMSE/m | MAPE |
|---|---|---|---|---|---|---|
| 10 m以浅 | Sentinel-2 (20220211) | RF | 0.452 | 4.27 | 5.35 | 1.524 |
| SVM | 0.115 | 4.57 | 6.40 | 2.389 | ||
| PLSR | 0.541 | 7.58 | 9.84 | 4.102 | ||
| Landsat-8 (20190716) | RF | 0.711 | 1.96 | 3.04 | 0.605 | |
| SVM | 0.121 | 5.21 | 6.63 | 3.046 | ||
| PLSR | 0.779 | 7.86 | 9.21 | 4.501 | ||
| Landsat-8 (20210628) | RF | 0.679 | 2.40 | 3.17 | 1.007 | |
| SVM | 0.385 | 4.50 | 6.14 | 2.495 | ||
| PLSR | 0.439 | 5.19 | 8.81 | 2.692 | ||
| 10~20 m | Sentinel-2 (20220211) | RF | 0.379 | 3.28 | 4.10 | 0.289 |
| SVM | 0.471 | 4.67 | 5.88 | 0.308 | ||
| PLSR | 0.364 | 7.27 | 7.85 | 0.513 | ||
| Landsat-8 (20190716) | RF | 0.553 | 4.01 | 4.87 | 0.295 | |
| SVM | 0.476 | 4.31 | 5.39 | 0.294 | ||
| PLSR | 0.627 | 7.64 | 7.86 | 0.551 | ||
| Landsat-8 (20210628) | RF | 0.417 | 3.64 | 4.93 | 0.310 | |
| SVM | 0.459 | 5.27 | 6.18 | 0.361 | ||
| PLSR | 0.317 | 5.69 | 6.77 | 0.397 | ||
| 20 m以浅 | Sentinel-2 (20220211) | RF | 0.731 | 3.16 | 4.08 | 0.879 |
| SVM | 0.576 | 4.62 | 6.14 | 1.302 | ||
| PLSR | 0.624 | 7.42 | 8.85 | 2.227 | ||
| Landsat-8 (20190716) | RF | 0.874 | 2.34 | 3.24 | 0.449 | |
| SVM | 0.586 | 4.78 | 5.83 | 1.623 | ||
| PLSR | 0.721 | 7.81 | 8.54 | 2.457 | ||
| Landsat-8 (20210628) | RF | 0.778 | 2.77 | 3.81 | 0.645 | |
| SVM | 0.750 | 4.90 | 6.16 | 1.387 | ||
| PLSR | 0.671 | 5.45 | 7.82 | 1.501 | ||
| 20~30 m | Sentinel-2 (20220211) | RF | 0.282 | 3.48 | 4.02 | 1.524 |
| SVM | 0.144 | 4.19 | 5.72 | 0.273 | ||
| PLSR | 0.206 | 3.65 | 4.28 | 0.130 | ||
| Landsat-8 (20190716) | RF | 0.346 | 3.78 | 4.51 | 0.147 | |
| SVM | 0.429 | 3.39 | 4.65 | 0.134 | ||
| PLSR | 0.336 | 2.65 | 3.11 | 0.102 | ||
| Landsat-8 (20210628) | RF | 0.274 | 3.86 | 5.05 | 0.154 | |
| SVM | 0.282 | 3.10 | 3.81 | 0.126 | ||
| PLSR | 0.373 | 2.85 | 3.62 | 0.115 |

王照翻:论文撰写、论文修改、开展实验、野外工作;
马梓程:整体设计、论文修改、开展实验、讨论和结论撰写;
熊忠招:整体思路指导、论文修改;
孙天成:遥感数据收集与预处理;
黄赞慧:水深数据收集与预处理;
符钉辉:机器学习方法研究与对比;
陈 靓:实验数据整理;
谢 菲:参与实验过程;
谢翠容:图表完善、文字精修;
陈 思:查漏补缺、文字精修。
|
Alpers W, and Hennings I. 1984. A Theory of the Imaging Mechanism of Underwater Bottom Topography by Real and Synthetic Aperture Radar. Journal of Geophysical Research: Oceans, 89(C6): 10529-10546.
|
|
Ashphaq M, Srivastava P K, and Mitra D. 2022. Evaluation and Performance of Satellite-Derived Bathymetry Algorithms in Turbid Coastal Water: A Case Study of Vengurla Rocks. Indian Journal of Geo-Marine Sciences, 51(4): 310-321.
|
|
Benveniste J, Cazenave A, Vignubelli S, Fenoglio-Marc L, and Shah R. 2019. Requirements for a Coastal Hazards Observing System. Frontiers in Marine Science, 6: 1-24.
|
|
Bramante J F, Raju D K, and Sin T M. 2013. Multispectral Derivation of Bathymetry in Singapore's Shallow, Turbid Waters. International Journal of Remote Sensing, 34(6): 2070-2088.
|
|
Breiman L. 2001. Random Forests. Machine Learning, 45: 5-32.
|
|
Cahalane C, Magee A, Monteys X, Casal G, Hanafin J, and Harris P. 2019. A Comparison of Landsat 8, RapidEye and Pleiades Products for Improving Empirical Predictions of Satellite-Derived Bathymetry. Remote Sensing of Environment, 233: 111414.
|
|
Calkoen C J, Hesselmans G H F M, Wensink G J, and Vogelzang J. 2001. The Bathymetry Assessment System: Efficient Depth Mapping in Shallow Seas Using Radar Images. International Journal of Remote Sensing, 22(15): 2973-2998.
|
|
陈黎,刘淑冰,李万能. 2019. 无人机遥感在河流岸线资源监管中的应用. 热带地理,39(4):521-530.
Chen Li, Liu Shubing, and Li Wanneng. 2019. Application of Unmanned Aerial Vehicles to River Shoreline Resources Supervision. Tropical Geography, 39(4): 521-530.
|
|
Ceyhun Ö, and Yalçın A. 2010. Remote Sensing of Water Depths in Shallow Waters via Artificial Neural Networks. Estuarine, Coastal and Shelf Science, 89(1): 89-96.
|
|
Duan Zhixin Chu Sensen, Cheng Liang, Ji Chen, Li Manchun, and Shen Wei. 2022. Satellite-Derived Bathymetry Using Landsat-8 and Sentinel-2A Images: Assessment of Atmospheric Correction Algorithms and Depth Derivation Models in Shallow Waters. Optics Express, 30(3): 3238-3261.
|
|
Eugenio F, Marcello J, and Martin J. 2015. High-Resolution Maps of Bathymetry and Benthic Habitats in Shallow-Water Environments Using Multispectral Remote Sensing Imagery. IEEE Transactions on Geoscience and Remote Sensing, 53(7): 3539-3549.
|
|
Evagorou E, Argyriou A, Papadopoulos N, Mettas C, Alexandrakis G, and Hadjimitsis D. 2022. Evaluation of Satellite-Derived Bathymetry from High and Medium-Resolution Sensors Using Empirical Methods. Remote Sensing, 14(3): 772.
|
|
Giardino C, Brando V E, Gege P, Pinnel N, Hochberg N, Knaeps E, Reusen I, Doerffer R, Bresciani M, Braga F, Foerster S, Champollion N, and Dekker A. 2019. Imaging Spectrometry of Inland and Coastal Waters: State of the Art, Achievements and Perspectives. Surveys in Geophysics, 40(3): 401-429.
|
|
黄华,李茂亿,陈吟晖,陈耿,刘海龙,邢前国,蔡建楠. 2021. 基于PLSR的珠江口城市河流水质高光谱反演. 水资源保护,37(5):36-42.
Huang Hua, Li Maoyi, Chen Yinhui, Chen Geng, Liu Hailong, Xing Qianguo, and Cai Jiannan. 2021. Water Quality Retrieval by Hyperspectral for City Rivers in Pearl River Estuary Based on Partial Least Squares. Water Resources Protection, 37(5): 36-42.
|
|
Jawak S D, Vadlamani S S, and Luis A J. 2015. A Synoptic Review on Deriving Bathymetry Information Using Remote Sensing Technologies: Models, Methods and Comparisons. Advances in Remote Sensing, 4(2): 147-162.
|
|
Klemas V V. 2009. The Role of Remote Sensing in Predicting and Determining Coastal Storm Impacts. Journal of Coastal Research, 256: 1264-1275.
|
|
李泽军,王小青,于祥祯,刘磊. 2012. SAR图像反演浅海地形的一种改进方法. 电子测量技术,35(4):86-89.
Li Zejun, Wang Xiaoqing, Yu Xiangzhen, and Liu Lei. 2012. Improved Retrieval Method for Shallow Sea Topography Using SAR Image. Electronic Measurement Technology, 35(4): 86-89.
|
|
Liaw A, and Wiener M. 2002. Classification and Regression by Random Forest. R News, 2(3): 18-22.
|
|
刘小菊,施祺,杨红强,周胜男 . 2020. 基于侧扫声呐影像的南海珊瑚礁沉船及周边地形重建. 热带地理,40(2):278-288.
Liu Xiaoju, Shi Qi, Yang Hongqiang, and Zhou Shengnan. 2020. Reconstruction of Shipwreck and Surrounding Relief at a Coral Reef in the South China Sea Based on Side Scan Sonar Image. Tropical Geography, 40(2): 278-288.
|
|
Lyons M, Phinn S, and Roelfsema C. 2011. Integrating Quickbird Multi-Spectral Satellite and Field Data: Mapping Bathymetry, Seagrass Cover, Seagrass Species and Change in Moreton Bay, Australia in 2004 and 2007. Remote Sensing, 3(1): 42-64.
|
|
Lyzenga D R. 1981. Remote Sensing of Bottom Reflectance and Water Attenuation Parameters in Shallow Water Using Aircraft and Landsat Data. International Journal of Remote Sensing, 2(1): 71-82.
|
|
Lyzenga D R, Malinas N P, and Tanis F J. 2006. Multispectral Bathymetry Using a Simple Physically Based Algorithm. IEEE Transactions on Geoscience and Remote Sensing, 44(8): 2251-2259.
|
|
Mateo-Pérez V, Corral-Bobadilla M, Ortega-Fernández F, and Vergara-González E P. 2020. Port Bathymetry Mapping Using Support Vector Machine Technique and Sentinel-2 Satellite Imagery. Remote Sensing, 12(13): 2069.
|
|
Mateo-Pérez V, Corral-Bobadilla M, Ortega-Fernández F, and Rodríguez-Montequín. 2021. Determination of Water Depth in Ports Using Satellite Data Based on Machine Learning Algorithms. Energies, 14(9): 2486.
|
|
Melet A, Teatini P, Le Cozannet G, Jamet C, Conversi A, Benveniste J, and Almar R. 2020. Earth Observations for Monitoring Marine Coastal Hazards and Their Drivers. Surveys in Geophysics, 41(6): 1489-1534.
|
|
Pahlevan N, Smith B, Schalles J, Binding C, Cao Z, Ma R, Alikas K, Kangro K, Gurlin D, Hà N, Matsushita B, Moses W, Greb S, Lehmann M, Ondrusek M, Oppelt N, and Stumpf R. 2020. Seamless Retrievals of Chlorophyll-a from Sentinel-2 (MSI) and Sentinel-3 (OLCI) in Inland and Coastal Waters: A Machine-Learning Approach. Remote Sensing of Environment, 240: 111604.
|
|
Pan Z, Glennie C, Fernandez-Diaz J C, and Starek M. 2016. Comparison of Bathymetry and Seagrass Mapping with Hyperspectral Imagery and Airborne Bathymetric Lidar in A Shallow Estuarine Environment. International Journal of Remote Sensing, 37(3): 516-536.
|
|
Polcyn F C, and Sattinger I J. 1969. Water Depth Determinations Using Remote Sensing Techniques. Remote Sensing of Environment, VI. 1969: 1017.
|
|
Porskamp P, Rattray A, Young M, and Ierodiaconou D. 2018. Multiscale and Hierarchical Classification for Benthic Habitat Mapping. Geosciences, 8(4): 119.
|
|
Purkis S J, Gleason A C R, Purkis C R, Dempsey A C, and Renaud P G. 2019. High-Resolution Habitat and Bathymetry Maps for 65,000 sq. km of Earth’s Remotest Coral Reefs. Coral Reefs, 38(3): 467-488.
|
|
Sagawa T, Yamashita Y, Okumura A T, and Yamanokuchi T. 2019. Satellite Derived Bathymetry Using Machine Learning and Multi-Temporal Satellite Images. Remote Sensing, 11(10): 1155.
|
|
Stumpf R P, Holderied K, and Sinclair M. 2003. Determination of Water Depth with High-Resolution Satellite Imagery over Variable Bottom Types. Limnology and Oceanography, 48(1part2): 547-556.
|
|
Traganos D, and Reinartz P. 2018. Interannual Change Detection of Mediterranean Seagrasses Using Rapid Eye Image Time Series. Frontiers in Plant Science, 9.
|
|
Wang W, Men C, and Lu W. 2008. Online Prediction Model Based on Support Vector Machine. Neurocomputing, 71(4): 550-558.
|
|
Wei Chunzhu, Zhao Qianying, Lu Yang, and Fu Dongjie. 2021. Assessment of Empirical Algorithms for Shallow Water Bathymetry Using Multi-Spectral Imagery of Pearl River Delta Coast, China. Remote Sensing, 13(16): 3123.
|
|
温开祥,李勇,王华,杨骥,荆文龙,杨传训. 2020. 基于遥感和机器学习的内陆水体水深反演技术. 热带地理,40(2):314-322.
Wen Kaixiang, Li Yong, Wang Hua, Yang Ji, Jing Wenlong, and Yang Chuanxun. 2020. Estimating Inland Water Depth Based on Remote Sensing and Machine Learning Technique. Tropical Geography, 40(2): 314-322.
|
|
Wold S, Sjöström M, and Eriksson L. 2001. PLS-Regression: A Basic Tool of Chemometrics. Chemometrics and Intelligent Laboratory Systems, 58(2): 109-130.
|
|
Wu Zhongqiang, Mao Zhihua, and Shen Wen. 2021. Integrating Multiple Datasets and Machine Learning Algorithms for Satellite-Based Bathymetry in Seaports. Remote Sensing, 13(21): 4328. 2022
|
|
薛振山,苏奋振,杨晓梅,孙晓宇,高义. 2012. 珠江口海岸带地貌特征对土地利用动态变化影响. 热带地理,32(4):409-415.
Xue Zhenshan, Su Fenzhen, Xiang Xiaomei, Sun Xiaoyu, and Gao Yi. 2012. Dynamic Change of Land Use in Coastal Zone of the Pearl River Estuary with Landform Analysis. Tropical Geography, 32(4): 409-415.
|
|
Yan Zhongluan, Qin Leilei, Wang Rui, Li Jia, Wang Xiaoming, Tang Xiliang, and An Ruidong. 2018. The Application of a Multi-Beam Echo-Sounder in the Analysis of the Sedimentation Situation of a Large Reservoir after an Earthquake. Water, 10(5): 557.
|
|
闫峰,王艳姣. 2008. 基于泥沙因子的水深遥感反演模型. 湖泊科学,20(5):655-661.
Yan Feng, and Wang Yanjiao. 2008. Water Depth Retrieval Models with Remote Sensing Sediment Parameter. J. Lake Sci., 20(5): 655-661.
|
|
赵现斌,严卫,王迎强,陆文,马烁. 2014. 基于海面散射模型的全极化合成孔径雷达海洋环境探测关键技术参数设计仿真研究. 物理学报,63(21):410-420.
Zhao Xianbin, Yan Wei, Wang Yingqiang, Lu Wen, and Ma Shuo. 2014. Simulation Study on the Design of Key Technical Parameters in Marine Environment Sounding with Fully Polarimetric Synthetic Aperture Radar Based on Ocean Surface Scattering Model. Acta Phys. Sin., 63(21): 410-420.
|
|
Zhang Huaguo, Lou Xiulin, Li Yan, Shi Aiqin, Li Dongling, and Fu Bin. 2015. Whitecap Features Induced by Submarine Sand Waves in Stereo Optical Imagery. Journal of Geophysical Research: Oceans, 120(9): 6225-6233.
|
|
张勇勇. 2022. 基于GF5-AHSI遥感数据的横沙浅海水深反演. 海洋学研究,40(2):93-101.
Zhang Yongyong. 2022. Inversion of Shallow Water Depth in Hengsha Based on GF5-AHSI Remote Sensing Data. Journal of Marine Sciences, 40(2): 93-101.
|
|
中国人民解放军海军参谋部. 2022. 海道测量规范(GB 12327-2022). 北京:国家市场监督管理总局,国家标准化管理委员会.
Chinese People's Liberation Army Navy Staff. 2022. Specifications for Hydrographic Survey (GB 12327-2022). Beijing: State Administration for Market Regulation, and National Standardization Administration Commission.
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}