
Water Extraction from Remote Sensing Images: Method Based on Convolutional Neural Networks
Received date: 2021-03-09
Revised date: 2021-09-29
Online published: 2022-05-26
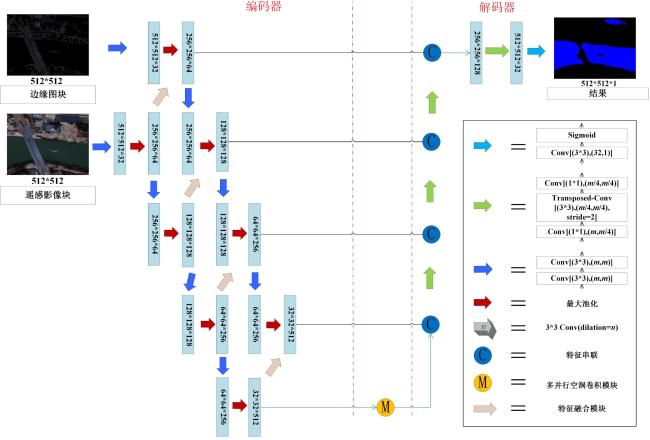
Accurate information on the spatial distribution of water is of great significance for monitoring water resources and applications, urban planning, and social and economic development. Remote sensing image segmentation technology based on convolutional neural networks has become an important approach for extracting the spatial distribution of water from remote sensing images. When only convolutional neural networks are used to extract spatial distributions of water from remote sensing images, there are often large differences between the features of edge and internal pixels of water objects, resulting in high noise, fuzzy boundaries, and large differences in the accuracy of extraction of internal and edge pixels. Improving the precision of edge pixel segmentation is the key to improving the precision of the whole extraction result. In this paper, the edge extraction algorithm is used to generate edge images from original images, and remote sensing images and edge images are taken as inputs to establish a water extraction model of high resolution based on semantic feature and edge feature fusion. A semantic and edge feature fusion network, SEF-NET (Semantic Feature and Edge Feature Fusion Network), is used to extract water objects from high-resolution remote sensing images. SEF-NET consists of an encoder, a multi-parallel cavity convolution module, a decoder, and a classifier. The encoder contains a group of semantic feature extraction units and a group of edge feature extraction units, and each group of feature extraction units can extract 4-level features. The multi-parallel cavity convolution module is composed of four extended convolution layers of different cavity sizes in series, which can obtain feature maps at four scales and add them together with the initial input feature maps to obtain multi-scale semantic feature maps. A 4-level decoding unit is set up for the decoder, which splices semantic feature images and edge feature images in series, and then performs feature fusion and upsampling. This strategy can reduce the feature difference between the edge pixel and the inner pixel of the object to obtain high inter-class discrimination and intra-class consistency. SoftMax was used as a classifier to complete pixel classification and generate the final segmentation results. In this paper, the Gaofen Image Dataset, the high-resolution visible light image water object dataset of the 2020 "Xingtucup" High-resolution Remote Sensing Image Interpretation Software Competition, and eight Gaofen-2 images from 2020 were selected for comparative experiments to extract water. SegNet, DeepLabV3, Refinenet and HED-H CNN were the comparison models. The recall rates (91.97%, 92.07%, 93.97%), accuracy rates (91.12%, 98.37%, 97.88%), precision rates (89.56%, 95.07%, 94.06%) and F1 scores (91.54%, 95.12%, 95.88%) were better than those in the comparison models, indicating that the SEF-NET model had greater accuracy and generalization ability in extracting water from high-resolution remote sensing images. Thus, the SEF-NET model served government decision-making and monitoring water pollution better than the comparison models did.
Hao Yin , Jinghan Zhang , Chengming Zhang , Yonglan Qian , Yingjuan Han , Yao Ge , Lihua Shuai , Ming Liu . Water Extraction from Remote Sensing Images: Method Based on Convolutional Neural Networks[J]. Tropical Geography, 2022 , 42(5) : 1 -13 . DOI: 10.13284/j.cnki.rddl.003483
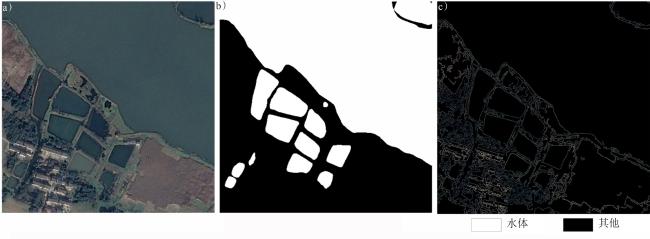
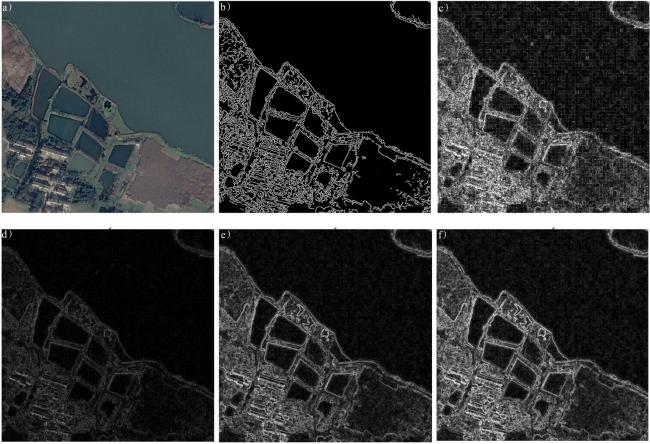
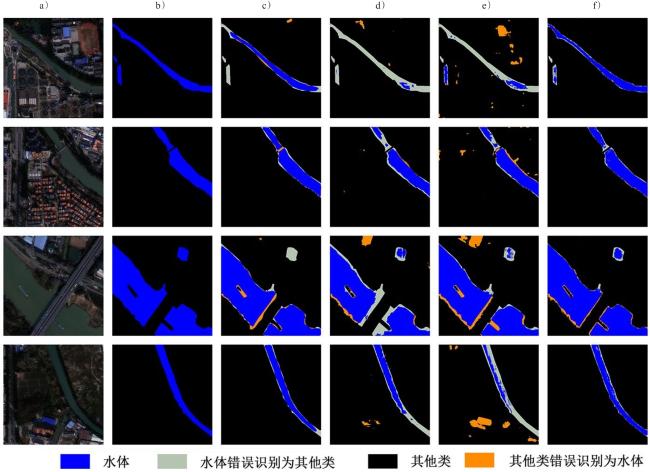
图8 图像块组示例(a. 原始图像;b. Canny边缘检测图;c. Laplacian边缘检测图;d. Roberts 边缘检测图;e. Prewitt边缘检测图;f. Sobel边缘检测图)Fig.8 Example of image block groups (a. original image; b. Canny edge detection diagram; c. Laplacian edge detection diagram; d. Roberts edge detection diagram; e. Prewitt edge detection diagram; f. Sobel edge detection diagram) |
表1 对比模型在3种数据集的结果比较Table 1 Comparison result of different model on three datasets % |
| 数据集 | 模型名 | F1分数 | 召回率 | 精确率 | 准确率 |
|---|---|---|---|---|---|
| GID数据集 | SegNet | 88.19 | 80.88 | 96.95 | 87.52 |
| Deeplabv3 | 91.15 | 85.84 | 97.15 | 89.29 | |
| Refinenet | 93.34 | 89.27 | 96.80 | 92.79 | |
| HED-H CNN | 93. 91 | 90.06 | 97.12 | 93.57 | |
| SEF-Net | 95.12 | 92.07 | 98.37 | 95.07 | |
| 广州地区数据集 | SegNet | 88.53 | 85.74 | 91.52 | 88.12 |
| Deeplabv3 | 91.19 | 89.57 | 92.89 | 89.96 | |
| Refinenet | 92.35 | 90.25 | 94.56 | 91.88 | |
| SEF-Net | 95.88 | 93.97 | 97.88 | 94.06 | |
| 高分水体数据集 | Deeplabv3 | 85.86 | 84.83 | 86.91 | 82.90 |
| Refinenet | 88.88 | 87.52 | 90.28 | 86.01 | |
| SEF-Net | 91.54 | 91.97 | 91.12 | 89.56 |

1 http://captain.whu.edu.cn/GID/
2 http://www.cresda.com/CN
尹 昊:完成了算法流程设计、算法实现、数据实验、论文撰写等工作;
张景涵:协助完成了算法实现、数据实验、初稿撰写等工作;
张承明:提出了算法思想并进行了算法设计、论文修改等工作;
钱永兰、韩颖娟:参与了论文修改工作;
葛瑶、帅丽华、刘铭:协助完成了数据实验。
|
Al-Obeidat F, Al-Taani A T, Belacel N, Feltrin L and Banerjee N. 2015. A Fuzzy Decision Tree for Processing Satellite Images and Landsat Data. Procedia Computer Science, 52: 1192-1197.
|
|
Badrinarayanan V, Kendall A and Cipolla R. 2017. Segnet: A deep Convolutional Encoder-Decoder Architecture for Image Segmentation. IEEE Transactions on Pattern Analysis and Machine Intelligence, 39(12): 2481-2495.
|
|
Berthon J F and Zibordi G. 2010. Optically Black Waters in the Northern Baltic Sea. Geophysical Research Letters, 37: 232-256.
|
|
常文涛,王浩,宁晓刚,张翰超. 2020. 融合Sentinel-2红边波段和Sentinel-1雷达波段影像的扎龙湿地信息提取. 湿地科学, 18(1):10-19.
Chang Wentao, Wang Hao, Ning Xiaogang and Zhang Hanchao. 2020. Extraction of Zhalong Wetland Information Based on Images of Sentinel-2 Red-Edge Bands and Sentinel-1 Radar Bands. Wetland Science, 18(1): 10-19.
|
|
陈坤,郝明,庄龙,谢聪. 2021. 基于卷积神经网络的SAR图像水体提取. 电子测量技术,44(3):125-131.
Chen Kun, Hao Ming, Zhuang Long and Xie Cong. 2021. Water Extraction from SAR Image Based on Convolutional Neural Network. Electronic Measurement Technology, 44(3): 125-131.
|
|
Chen L C, Papandreou G, Kokkinos I, Murphy K and Yuille A L. 2019. Deeplab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution, and Fully Connected CRFs. IEEE Transactions on Pattern Analysis and Machine Intelligence, 40(4): 834-848.
|
|
Cheng Dongcai, Meng Gaofeng, Xiang Shiming and Pan Chunhong. 2017. Fusionnet: Edge Aware Deep Convolutional Networks for Semantic Segmentation of Remote Sensing Harbor Images. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 10(12): 5769-5783.
|
|
何海清,杜敬,陈婷,陈晓勇.2017. 结合水体指数与卷积神经网络的遥感水体提取. 遥感信息,32(5):82-86.
He Haiqing, Du Jing, Chen Ting and Chen Xiaoyong. 2017. Remote Sensing Image Water Body Extraction Combing NDWI with Convolutional Neural Network. Remote Sensing Information, 32(5): 82-86.
|
|
何红术,黄晓霞,李红旮,倪凌佳,王新歌,陈崇,柳泽. 2020. 基于改进U-Net网络的高分遥感影像水体提取. 地球信息科学学报,22(10):2010-2022.
He Hongshu, Huang Xiaoxia, Li Hongga, Ni Lingjia, Wang Xinge, Chen Chong and Liu Ze. 2020. Water Body Extraction of High Resolution Remote Sensing Image Based on Improved U-Net Network. Journal of Geo-Information Science, 22(10): 2010-2022.
|
|
He K, Zhang X, Ren S and Sun J. 2016. Deep Residual Learning for Image Recognition. Las Vegas: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 770-778.
|
|
黄巍,黄辉先,徐建闽,刘嘉婷. 2019. 基于Canny边缘检测思想的改进遥感影像道路提取方法. 国土资源遥感,31(1):65-70.
Huang Wei, Huang Huixian, Xu Jianmin and Liu Jiating. 2019. An Improved Road Extraction Method for Remote Sensing Images Based on Canny Edge Detection. Remote Sensing for Natural Resources, 31(1): 65-70.
|
|
Ioffe S and Szegedy C. 2015. Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift. Lille:International Conference on Machine Learning, 448-456.
|
|
Karpatne A, Khandelwal A, Chen X, Mithal V, Faghmous J and Kumar V. 2016. Global Monitoring of Inland Water Dynamics: State-of-the-Art, Challenges, and Opportunities. In: Lässig Jörg, Kersting Kristian and Morik Katharina. Computational Sustainability.Cham, Switzerland: Springer, 121-147.
|
|
Lin Guosheng, Milan A, Shen C and Reid I. 2017. Refinenet: Multi-Path Refinement Networks for High-Resolution Semantic Segmentation. Honolulu: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 1925-1934.
|
|
Little W A. 1974. The Existence of Persistent States in the Brain. Mathematical Biosciences, 19(1/2): 101-120.
|
|
Liu Shuo, Ding Wenrui, Liu Chunhui, Liu Yu, Wang Yufeng and Li Hongguang. 2018. ERN: Edge Loss Reinforced Semantic Segmentation Network for Remote Sensing Images. Remote Sensing, 10(9): 1339.
|
|
Liu W, Wen Y, Yu Z and Yang M. 2016. Large-Margin Softmax Loss for Convolutional Neural Networks. Lille: Proceedings of the 33rd International Conference on Machine Learning, 507-516.
|
|
刘文祥,舒远仲,唐小敏,刘金梅. 2020. 采用双注意力机制Deeplabv3+算法的遥感影像语义分割. 热带地理,40(2):303-313.
Liu Wenxiang, Shu Yuanzhong, Tang Xiaomin and Liu Jinmei. 2020. Remote Sensing Image Segmentation Using Dual Attention Mechanism Deeplabv3+ Algorithm. Tropical Geography, 40(2): 303-313.
|
|
Long J, Shelhamer E and Darrell T. 2015. Fully Convolutional Networks for Semantic Segmentation. Boston: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 3431-3440.
|
|
Lyu H, Fu H, Hu X and Liu L. 2019. Esnet: Edge-Based Segmentation Network for Real-Time Semantic Segmentation in Traffic Scenes. Taipei:2019 IEEE International Conference on Image Processing (ICIP), 1855-1859.
|
|
Marmanis D, Schindler K, Wegner J D, Galliani S, Datcu M and Stilla U. 2018. Classification with an Edge: Improving Semantic Image Segmentation with Boundary Detection. ISPRS Journal of Photogrammetry and Remote Sensing, 135: 158-172.
|
|
McFeeters S K. 1996. The Use of the Normalized Difference Water Index (NDWI) in the Delineation of Open Water Features. International Journal of Remote Sensing, 17(7): 1425-1432.
|
|
Minaee Shervin and Wang Yao. 2019. An ADMM Approach to Masked Signal Decomposition Using Subspace Representation. IEEE Transactions on Image Processing, 28(7): 3192-3204.
|
|
Noh H, Hong S and Han B. 2015. Learning Deconvolution Network for Semantic Segmentation. Santiago:Proceedings of the IEEE International Conference on Computer Vision, 1520-1528.
|
|
Rubinstein R. 1999. The Cross-Entropy Method for Combinatorial and Continuous Optimization. Methodology & Computing in Applied Probability, 1(2): 127-190.
|
|
单治彬,孔金玲,张永庭,李欢,关红,胡永新,李健锋,张文博. 2018. 面向对象的特色农作物种植遥感调查方法研究. 地球信息科学学报,20(10):1509-1519.
Shan Zhibing, Kong Jinling, Zhang Yongting, Li Huan, Guan Hong, Hu Yongxin, Li Jianfeng and Zhang Wenbo. 2018. Remote Sensing Investigation Method of Object-Oriented Crops with Special Charateristics. Journal of Geo-Information Science, 20(10): 1509-1519.
|
|
Shrivakshan G T and Chandrasekar C. 2012. A Comparison of Various Edge Detection Techniques Used in Image Processing. International Journal of Computer Science Issues, 9(5): 269-276.
|
|
汤涌,项铮,蒋腾平. 2020. 基于三维激光点云的复杂道路场景杆状交通设施语义分类. 热带地理,40(5):893-902.
Tang Yong, Xiang Zheng and Jiang Tengping. 2020. Semantic Classification of Rod-Shaped Traffic Facilities in Complex Road Scenes Based on 3D Laser Point Cloud. Tropical Geography, 40(5): 893-902.
|
|
Xu Hanqiu. 2006. Modification of Normalised Difference Water Index (NDWI) to Enhance Open Water Features in Remotely Sensed Imagery. International Journal of Remote Sensing, 27(14): 3025-3033.
|
|
Wang Guojie, Wu Mengjuan, Wei Xikun and Song Huihui. 2020. Water Identification from High-Resolution Remote Sensing Images Based on Multidimensional Densely Connected Convolutional Neural Networks. Remote Sensing, 12(5): 795.
|
|
王囡,侯志强,赵梦琦,余旺盛,马素刚. 2021. 结合边缘检测的语义分割算法. 计算机工程,47(7):257-265.
Wang Nan, Hou Zhiqiang, Zhao Mengqi, Yu Wangsheng and Ma Sugang. 2020. Semantic Segmentation Algorithm Combined with Edge Detection. Computer Engineering, 47(7): 257-265.
|
|
王帆,李崇贵,马婷,刘梦霞,张志超. 2021. 一种改进的遥感影像水体信息快速提取方法. 人民长江,52(6):223-228.
Wang Fan, Li Chonggui, Ma Ting, Liu Mengxia and Zhang Zhichao. 2021. A Modified Method for Water Body Information Rapid Extracting from Remote Sensing Images. Yangtze River, 52(6): 223-228.
|
|
王一帆,徐涵秋. 2020. 基于客观阈值与随机森林Gini指标的水体遥感指数对比. 遥感技术与应用,35(5):1089-1098.
Wang Yifan and Xu Hanqiu. 2020. Comparison of Remote Sensing Water Indices Based on Objective Threshold Value and the Random Forest Gini Coefficient. Remote Sensing Technology and Application, 35(5): 1089-1098.
|
|
Zhang Yongjun, Liu Xinyi, Zhang Yi, Ling Xiao and Huang Xu. 2018. Automatic and Unsupervised Water Body Extraction Based on Spectral-Spatial Features Using GF-1 Satellite Imagery. IEEE Geoscience and Remote Sensing Letters, 16(6): 927-931.
|
|
Zhang Fan, Ni Jun, Yin Qiang, Li Wei, Li Zheng, Liu Yifan and Hong Wen. 2017. Nearest-Regularized Subspace Classification for PolSAR Imagery Using Polarimetric Feature Vector and Spatial Information. Remote Sensing, 9(11): 1114.
|
|
Zhou Ya'nan, Luo Jiancheng, Shen Zhanfeng, Hu Xiaodong and Yang Haiping. 2014. Multiscale Water Body Extraction in Urban Environments from Satellite Images. IEEE Journal of Selectied Topics in Applied Earth Observations and Remote Sensing, 7(10): 4301-4312.
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}